Produkt




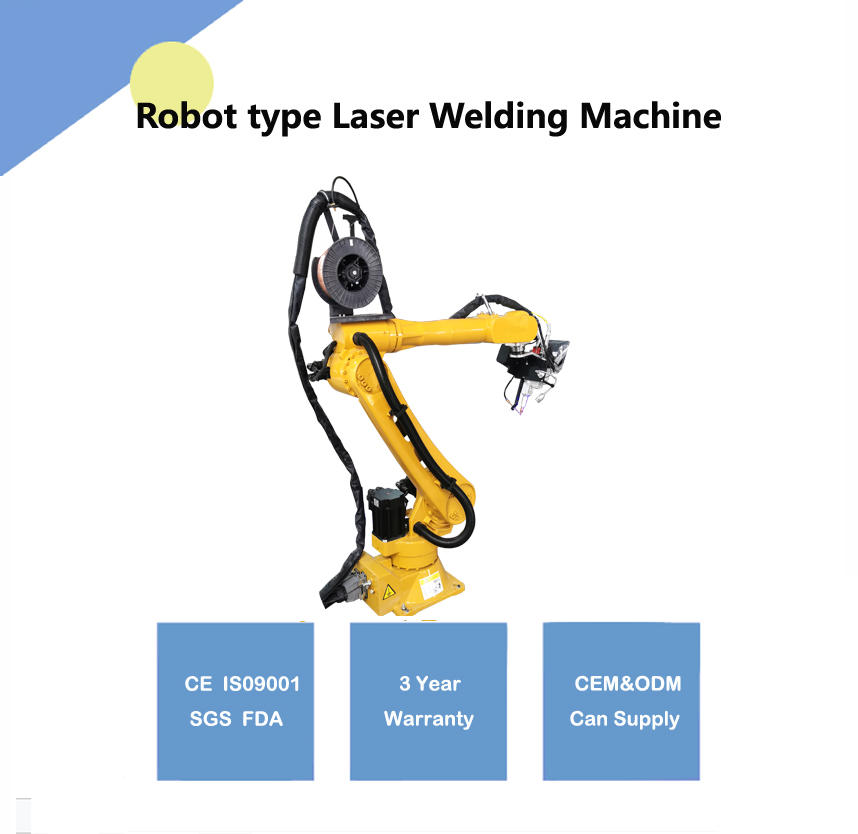
Robottype lasersvejsemaskine
Produktvisning
Teknisk parameter
| Seksakset robot | Tuling | Kernekomponenter | Laserkilde |
| Brug | Svejsemetal | Maks. udgangseffekt | 2000W |
| Anvendeligt materiale | Metal | CNC eller ej | Ja |
| Køletilstand | Vandkøling | Elektriske og pneumatiske systemer | Schneider |
| Bølgelængde | 1090 Nm | Laserkraft | 1000w/1500w/2000w |
| Vægt (kg) | 600 kg | Certificering | CE, ISO9001 |
| Kernekomponenter | Fiberlaserkilde, fiber, håndtagslasersvejsehoved | Vigtige salgsargumenter | Høj nøjagtighed |
| Fungere | Lasersvejsning af metaldele | Fiberlængde | ≥10m |
| Anvendelige brancher | Hoteller, Tøjbutikker, Byggematerialebutikker | Kernekomponenter | Laserkilde |
| Driftstilstand | Pulseret | Service efter garanti | Onlinesupport |
| Fokalpunktdiameter | 50 μm | Maksimal dækning | 1730 mm |
| Video Udgående Inspektion | Forudsat | Understøttet grafisk format | AI, PLT, DXF, DWG, DXP |
| Oprindelsessted | Jinan, Shandong-provinsen | Garantitid | 3 år |
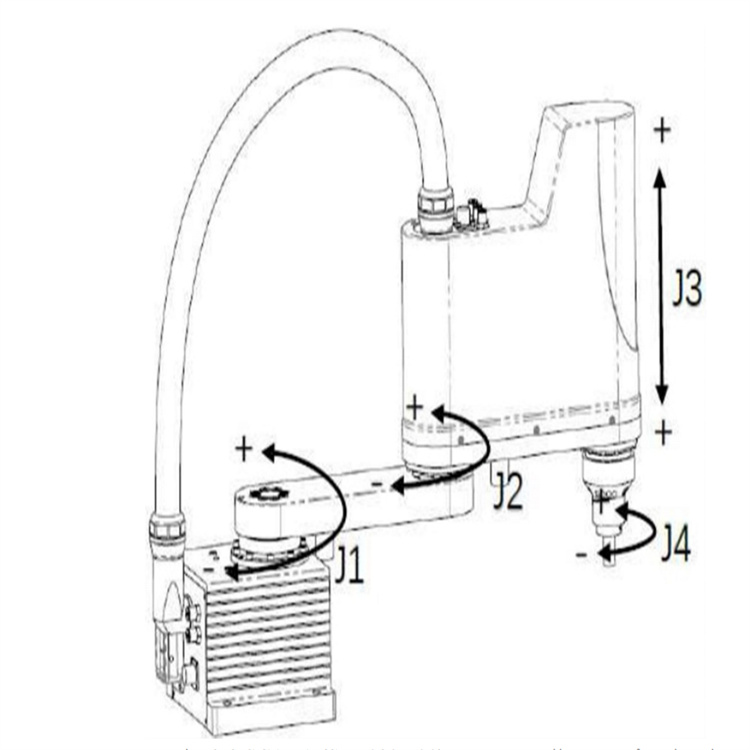
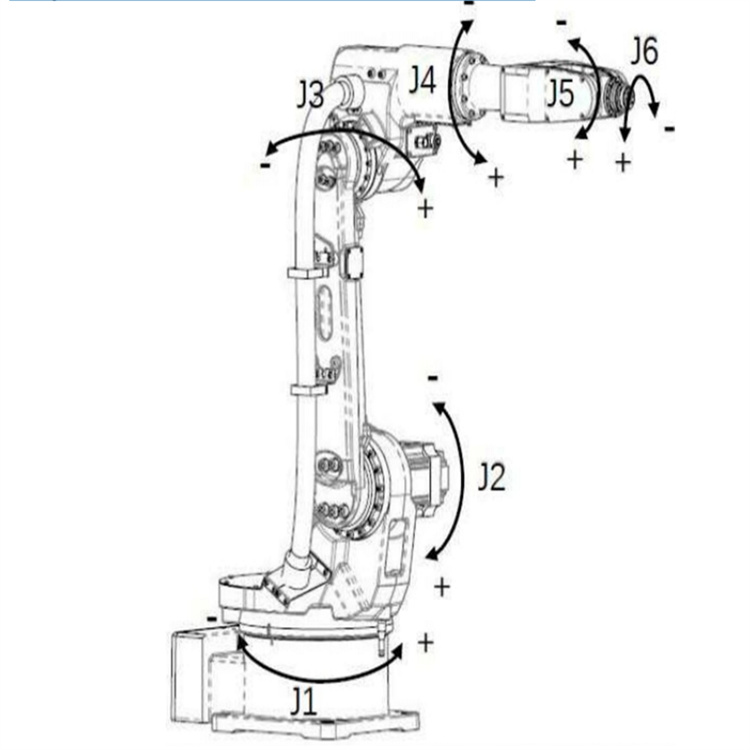
Robotarm
Robotaksen kan være en rotationsakse eller en translationsakse, og aksens driftstilstand bestemmes af den mekaniske struktur. Robotaksen er opdelt i robotkroppens bevægelsesakse og den eksterne akse. Den eksterne aksel er opdelt i et glidebord og en positioneringsenhed. Medmindre andet er angivet, refererer robotaksen til robotkroppens bevægelsesakse.
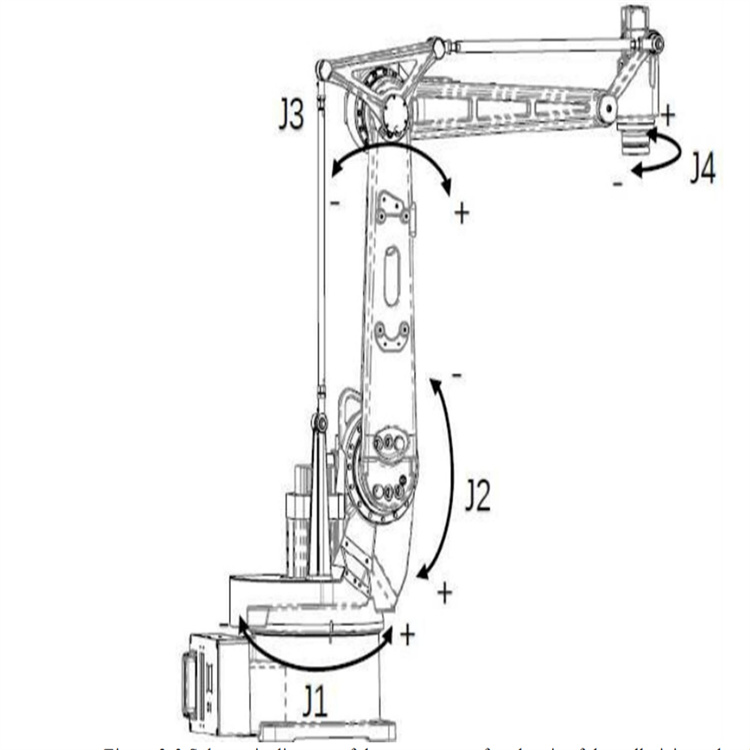
Turing-robotter er opdelt i tre typer industrirobotter:
Industriel seksakset robot: inklusive seks rotationsakser
SCARA: indeholder tre rotationsakser og en translationsakse
Palleteringsmanipulator: inklusive fire roterende aksler. Robottens fælles bevægelse er vist på figuren.
Anvendelse af robotsvejsemaskine
1. Maskinproduktionsfelt
Med intensiveringen af svejseopgaver i maskinindustrien har svejseoperationen i sagens natur dårlige arbejdsforhold og stor varmestråling, hvilket er et meget farligt erhverv. Der er også meget storskalaudstyr i maskinindustrien, hvilket også øger vanskeligheden ved svejsning. En svejserobot er et automatisk mekanisk udstyr, der er involveret i svejsearbejde, hvilket frigør arbejdernes arbejdsintensitet og hjælper med at forbedre automatiseringsniveauet inden for maskinfremstilling.
2. Biler og autodele:
I de senere år har bilindustrien vist en diversificeret udvikling for at imødekomme offentlighedens behov. Traditionel svejsning kan ikke opfylde de høje svejsekrav, der stilles til fremstilling af biler og bildele. Svejsesømmen er smuk og fast. I mange moderne bilproduktionsværksteder er der blevet dannet svejserobotmonteringslinjer.
3. Elektronisk udstyr:
Elektronisk udstyr har relativt høje krav til svejsekvalitet. Med den stigende efterspørgsel efter elektronisk udstyr i samfundet står elektronisk udstyr også over for alvorlige udfordringer, samtidig med at det udvikler sig hurtigt. Svejserobotter kan stabilisere svejsekvaliteten og samtidig sikre produktionseffektivitet. Den præcise svejsning af udstyret er tre til fire gange højere end ved manuelt arbejde.
4. Luftfart:
I flyets struktur er der næsten 1.000 svejsede komponenter i flyets karosseri, og næsten 10.000 dele er involveret. De fleste af flyets vigtige lastbærende komponenter bruger svejsede komponenter. Flyets karosseri er under stort pres under flyvning, så svejsekravene er relativt strenge, og svejserobotten kan fleksibelt indstille svejseparametrene ved hjælp af automatisk svejsesømsporingsteknologi for præcist at svejse flyets struktur.
Vedligeholdelse af maskine
- Trådfremføringsmekanisme. Herunder om trådfremføringsafstanden er normal, om trådfremføringskanalen er beskadiget, og om der er en unormal alarm; Om gasstrømmen er normal; Om svejsebrænderens sikkerhedssystem er normalt. (Det er forbudt at lukke svejsebrænderen for sikkerhedsbeskyttelsesarbejde); Om vandcirkulationssystemet fungerer normalt; Test TCP (det anbefales at kompilere et testprogram og køre det efter hver vagt)
2. Ugentlig inspektion og vedligeholdelse
1. Skrub hver robotakse; Kontroller nøjagtigheden af TCP'en; Kontroller det resterende olieniveau; Kontroller, om nulpositionen for hver robotakse er nøjagtig; Rengør filteret bag svejsemaskinens vandtank.; Rengør filteret ved trykluftindtaget; Rengør urenheder ved svejsebrænderens dyse for at undgå tilstopning af vandcirkulationen; Rengør trådfremføringsmekanismen, inklusive trådfremføringshjul, trådtrykhjul og trådføringsrør; Kontroller, om slangebundtet og styretrådslangen er beskadiget eller ødelagt. (Det anbefales at fjerne hele slangebundtet og rengøre det med trykluft); Kontroller, om svejsebrænderens sikkerhedssystem er normalt, og om den eksterne nødstopknap er normal.